Back to Courses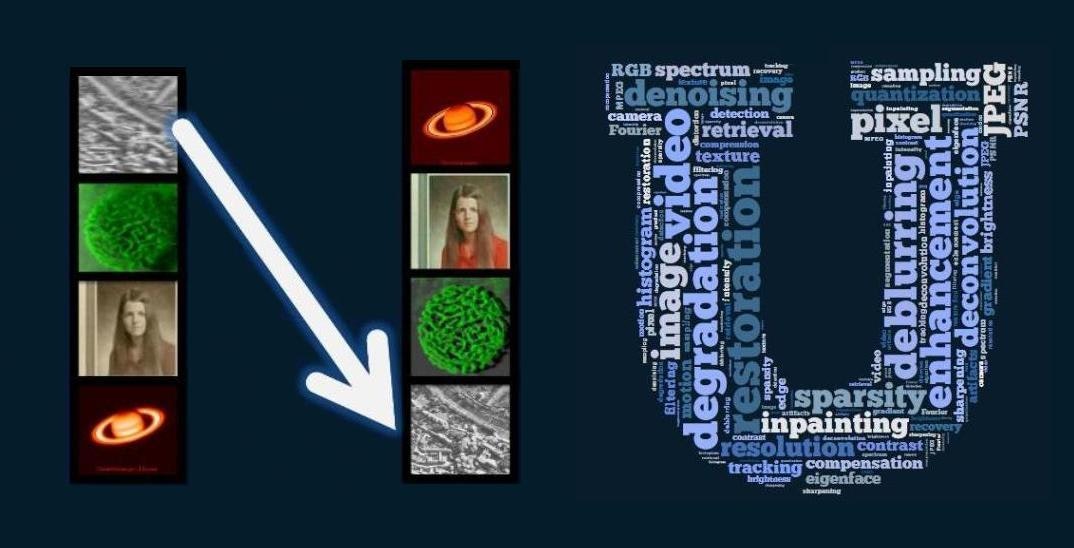




Electrical Engineering Courses - Page 5
Showing results 41-50 of 141
Fundamentals of Digital Image and Video Processing
In this class you will learn the basic principles and tools used to process images and videos, and how to apply them in solving practical problems of commercial and scientific interests.
Digital images and videos are everywhere these days – in thousands of scientific (e.g., astronomical, bio-medical), consumer, industrial, and artistic applications. Moreover they come in a wide range of the electromagnetic spectrum - from visible light and infrared to gamma rays and beyond. The ability to process image and video signals is therefore an incredibly important skill to master for engineering/science students, software developers, and practicing scientists. Digital image and video processing continues to enable the multimedia technology revolution we are experiencing today. Some important examples of image and video processing include the removal of degradations images suffer during acquisition (e.g., removing blur from a picture of a fast moving car), and the compression and transmission of images and videos (if you watch videos online, or share photos via a social media website, you use this everyday!), for economical storage and efficient transmission.
This course will cover the fundamentals of image and video processing. We will provide a mathematical framework to describe and analyze images and videos as two- and three-dimensional signals in the spatial, spatio-temporal, and frequency domains. In this class not only will you learn the theory behind fundamental processing tasks including image/video enhancement, recovery, and compression - but you will also learn how to perform these key processing tasks in practice using state-of-the-art techniques and tools. We will introduce and use a wide variety of such tools – from optimization toolboxes to statistical techniques. Emphasis on the special role sparsity plays in modern image and video processing will also be given. In all cases, example images and videos pertaining to specific application domains will be utilized.
Manipulating basic laws of mechanics using wolfram notebook
Mechanics is one the most important subject in physics. You will learn many concepts and key points under mechanics title those will also be used in other subjects of physics. Mechanics can be defined as the behavior of the particle under any effects. It can be studied under main two topics which are kinematics concerning the motion of the particle and dynamics concerning the causes of motion. Kinematics is one of the two branches of mechanics. It deals with the motion of particles not the causes of the motion. Motion in one dimension in other words linear motion and projectile motion are the subtitles of kinematics they are also called as 1D and 2D kinematics. Dynamics deal with the causes of motion. What makes objects move is our primary concern. Moreover, we give Newton’s law of motion and try to explain causes of motion with these laws. Let’s begin with concepts one by one that will help us in analyzing motion.
In this 1-hour long project-based course, you will be able to- analyze the variables that affect Force as a function, compute newtons second law of motion, Compute the motion of block on an inclined plane, Compute torque, analyze the variables that affect momentum of a body and calculate centripetal acceleration of a body on a circular path.
Introduction to Embedded Systems Software and Development Environments
Welcome to the Introduction to Embedded Systems Software and Development Environments. This course is focused on giving you real world coding experience and hands on project work with ARM based Microcontrollers. You will learn how to implement software configuration management and develop embedded software applications. Course assignments include creating a build system using the GNU Toolchain GCC, using Git version control, and developing software in Linux on a Virtual Machine. The course concludes with a project where you will create your own build system and firmware that can manipulate memory.
The second course in this 2 course series , Embedded Software and Hardware Architecture, will use hardware tools to program and debug microcontrollers with bare-metal firmware. Using a Texas Instruments MSP432 Development Kit, you will configure a variety of peripherals, write numerous programs, and see your work execute on your own embedded platform!
Internet of Things: Multimedia Technologies
Content is an eminent example of the features that contributed to the success of wireless Internet. Mobile platforms such as the Snapdragon™ processor have special hardware and software capabilities to make acquisition, processing and rendering of multimedia content efficient and cost-effective.
In this course, you will learn the principles of video and audio codecs used for media content in iTunes, Google Play, YouTube, Netflix, etc. You will learn the file formats and codec settings for optimizing quality and media bandwidth and apply them in developing a basic media player application.
Learning Goals: After completing this course, you will be able to:
1. Explain the tradeoffs between media quality and bandwidth for content delivery.
2. Extract and display metadata from media files.
3. Implement and demonstrate a simple media player application using DragonBoard™ 410c.
Explore Einstein's theories of Relativity using Wolfram
Explore Einstein's theories of Relativity using Wolfram -The theory of relativity usually encompasses two interrelated theories by Albert Einstein: special relativity and general relativity, proposed and published in 1905 and 1915, respectively.[1] Special relativity applies to all physical phenomena in the absence of gravity. General relativity explains the law of gravitation and its relation to other forces of nature.[2] It applies to the cosmological and astrophysical realm, including astronomy.
The theory transformed theoretical physics and astronomy during the 20th century, superseding a 200-year-old theory of mechanics created primarily by Isaac Newton.[3][4][5] It introduced concepts including spacetime as a unified entity of space and time, relativity of simultaneity, kinematic and gravitational time dilation, and length contraction. In the field of physics, relativity improved the science of elementary particles and their fundamental interactions, along with ushering in the nuclear age. With relativity, cosmology and astrophysics predicted extraordinary astronomical phenomena such as neutron stars, black holes, and gravitational waves.
Exploring fluid mechanics using Wolfram notebook
Exploring fluid mechanics using Wolfram notebook
Modeling and Debugging Embedded Systems
This course can also be taken for academic credit as ECEA 5387, part of CU Boulder’s Master of Science in Electrical Engineering degree.
This is part 3 of the specialization. In this course students will learn :
* About SystemC and how it can be used to create models of cyber-physical systems in order to perform "what-if" scenarios
* About Trimble Engineering's embedded systems for heavy equipment automation
* A deeper understanding of embedded systems in the Automotive and Transportation market segment
* How to debug deeply embedded systems
* About Lauterbach's TRACE32 debugging tools
* How to promote technical ideas within a company
* What can be learned from studying engineering failures
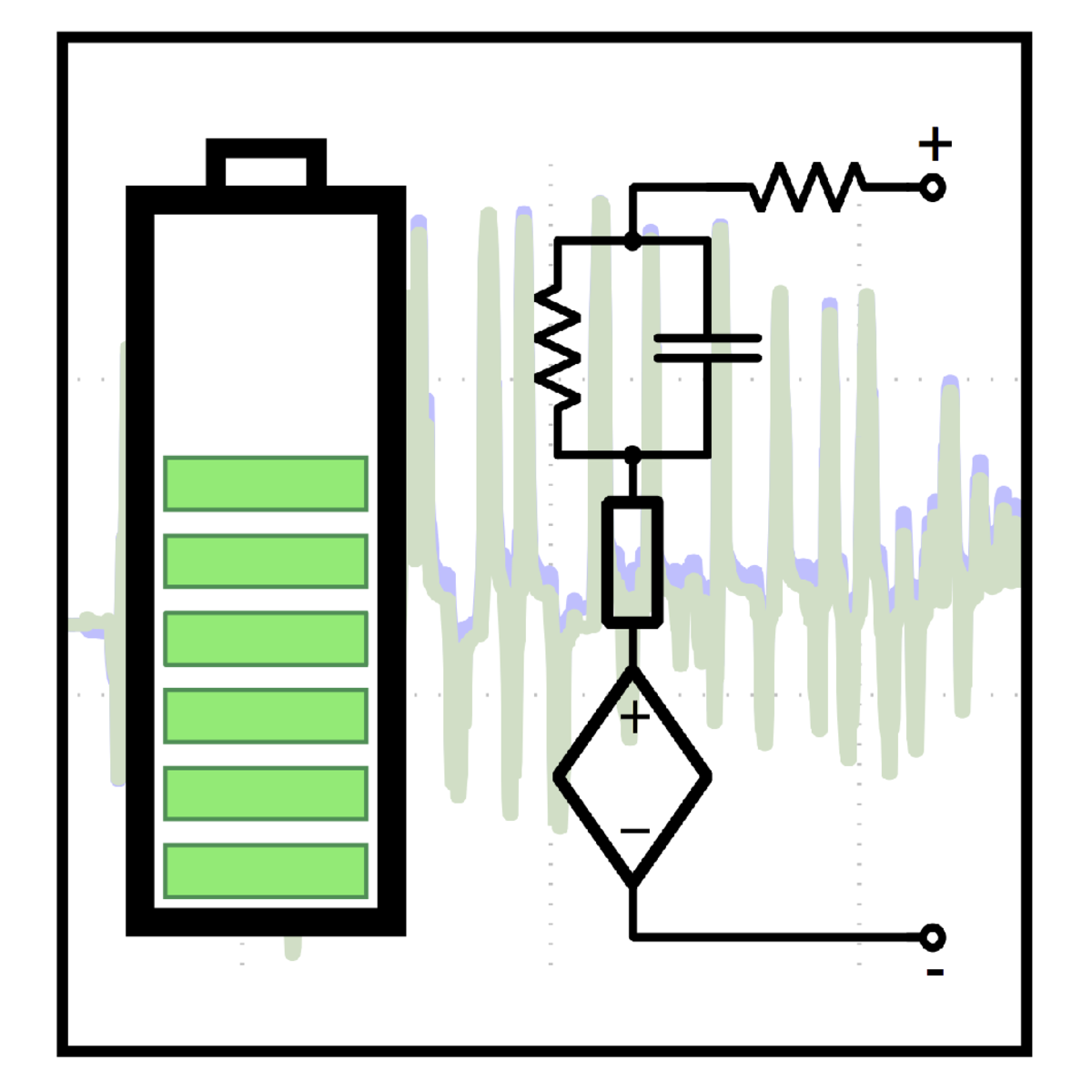
Equivalent Circuit Cell Model Simulation
This course can also be taken for academic credit as ECEA 5731, part of CU Boulder’s Master of Science in Electrical Engineering degree.
In this course, you will learn the purpose of each component in an equivalent-circuit model of a lithium-ion battery cell, how to determine their parameter values from lab-test data, and how to use them to simulate cell behaviors under different load profiles. By the end of the course, you will be able to:
- State the purpose for each component in an equivalent-circuit model
- Compute approximate parameter values for a circuit model using data from a simple lab test
- Determine coulombic efficiency of a cell from lab-test data
- Use provided Octave/MATLAB script to compute open-circuit-voltage relationship for a cell from lab-test data
- Use provided Octave/MATLAB script to compute optimized values for dynamic parameters in model
- Simulate an electric vehicle to yield estimates of range and to specify drivetrain components
- Simulate battery packs to understand and predict behaviors when there is cell-to-cell variation in parameter values
Current-Mode Control
This course can also be taken for academic credit as ECEA 5708, part of CU Boulder’s Master of Science in Electrical Engineering degree.
This is Course #4 in the Modeling and Control of Power Electronics course sequence. The course is focused on current-mode control techniques, which are very frequently applied in practical realizations of switched-mode. Practical advantages of peak current mode control are discussed, including built-in overcurrent protection, simpler and more robust dynamic responses, as well as abilities to ensure current sharing in parallel connected converter modules. For peak current-mode controlled converters, slope compensation, and high-frequency effects are discussed in detail. Upon completion of the course, you will be able to understand, analyze, model, and design high-performance current-mode controllers for dc-dc power converters, including peak current-mode controllers and average current-mode controllers.
We strongly recommend students complete the CU Boulder Power Electronics specialization as well as Course #1 (Averaged-Switch Modeling and Simulation) before enrolling in this course (the course numbers provided below are for students in the CU Boulder's MS-EE program):
● Introduction to Power Electronics (ECEA 5700)
● Converter Circuits (ECEA 5701)
● Converter Control (ECEA 5702)
● Averaged-Switch Modeling and Simulation (ECEA 5705)
After completing this course, you will be able to:
● Understand the operating principles and benefits of current-mode control for dc-dc converters
● Model and design peak current-mode controlled dc-dc converters
● Model and design average current-mode controlled dc-dc converters
● Use computer-aided tools and simulations to verify current-mode controlled dc-dc converters
Real-Time Mission-Critical Systems Design
This course can also be taken for academic credit as ECEA 5317, part of CU Boulder’s Master of Science in Electrical Engineering degree.
Upon completion of this course the learner will know the difference between systems you can bet your life on (mission critical) and those which provide predictable response and quality of service (reliable). This will be achieved not only by study of design methods and patterns for mission critical systems, but also through implementation of soft real-time systems and comparison to hard real-time. Methods of verification to determine ability to meet mission critical as well as soft real-time requirements will be learned so that the learner can properly assess risk, reliability and impact of failure in real-time systems.
At the end of this course learners will be able to apply an architectural style (cyclic executive, RTOS, or embedded Linux) to more detailed design of a mission critical system, a soft real-time system, or a mixed hard and soft real-time system, including:
● Thorough understanding of hardware/software device interfaces and resource view for hardware abstraction layers (HAL, BSP)
● Design trade-offs with different real-time hardware architectures including single core, multi-core, hybrid-FPGA, GP-GPU, and DSP systems, with emphasis on multi-core
● Mission critical embedded systems architecture and key design elements
● Fault tolerant processing, memory, and I/O concepts
Popular Internships and Jobs by Categories
Find Jobs & Internships
Browse





© 2024 BoostGrad | All rights reserved